![]()
Greetings! This is Hamaya from the Device Plus Editorial Team in Japan.
This post was a collaboration project with Robocon Magazine, which covers sumo robot competitions in Japan. I hope you enjoy this report from the Robocon Magazine Editorial Team.
Robocon Magazine is a general robotics magazine, and is well recognized as a medium that reports on various robotics contests in Japan. But since it’s a print magazine, it naturally has limits. On this post, we will reveal some of the details not being covered in the print edition.
Here, we’re going to explain Sumo robot technology mixed with details from the 26th All Japan Robot Sumo National Competition held at the National Sumo Hall on 12/14/2014.

The All Japan Robot Sumo Competition, sponsored by Fuji Software, is the best public competition in Japan and in the world. Every year, approximately 1,000 teams participate and only the 64 teams that win in the 9 regions get to enter the ring in the national sumo robot competition held at the National Sumo Hall. The highest honor of “Yokozuna” is awarded to the robot that wins here.
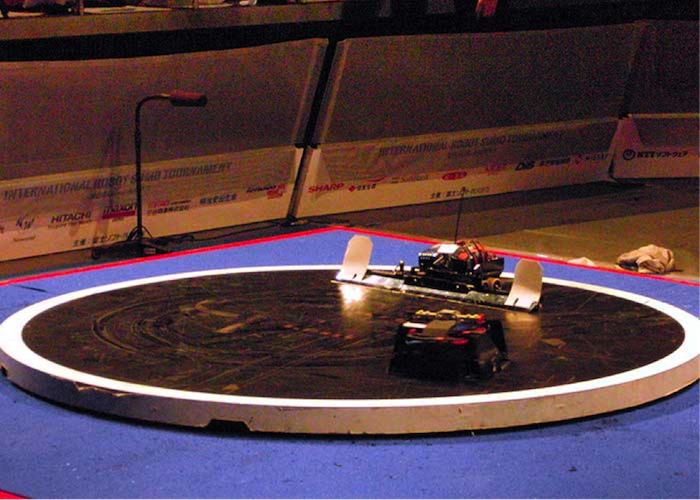
A sumo robot ring is a circular metal sheet that is a little over 5’ in diameter. In place of the traditional sumo ring boundary, a 5cm wide white line is painted on the sheet. If you fall outside that boundary, you lose.
In robot sumo, this is the only way to win. In other words, either your opponent pushes you out or you fall out due to your own excess momentum, either way this means a win for your opponent. There are three rounds so two falls ends in a loss.
In order to not lose, sumo robots have sensors to detect the white line. Normally, one is placed on each corner so robots are equipped with a total of 4 white line sensors.
The white line sensor on the front is to make sure a robot doesn’t fall out of the ring through its own excess momentum. While navigating around the ring, these sensors are also needed to go for your opponent’s side or back.
The white line sensor on the back is used when trying to put distance between you and your opponent. If you simply retreat to the edge, you could be pushed out. So, you change your stance by wrapping around and cutting back in. If there is a response from the white line sensors on either the back left or back right, that’s the edge of the ring so you have to change the direction of your wraparound.
Infrared waves are used in this white line sensor. They are emitted at the surface of the ring and the degree of reflection is measured by a light-sensitive element. Because the white line reflects more light than the black surface, whenever a strong infrared wave bounces back, that indicates the white line. Infrared is used because it is not easily affected by other light sources like overhead lighting.


Infrared, which is not easily affected by the lighting in the sumo robot competition hall, is also used as a perception sensor to detect the opposing robot.
In other words, the perception sensor is the sumo robot’s eye. Because infrared beams are emitted straight ahead and the reflecting light from the opponent is used to detect its location, the field of vision is narrow. Installation of multiple sensors ensures a wider field of vision.
If the time it takes for reflecting beams to bounce back is measured, the distance to the opponent can also be measured. Many robots can change their direction corresponding to that distance.
Incidentally, Yasumishi Kijima’s “6-Dimensional K,” who won multiple stand-alone contests at the 22nd tournament, was also able to detect opponents’ direction of movement from data from multiple sensors. It conducted its strategy corresponding to this.
As previously stated, the perception sensor’s field of vision is narrow. As such, there are naturally many blind spots and to attack them is a basic strategy of high maneuverability sumo robots.
That said, this is only for competitions between stand-alone competitors. If a stand-alone type is used in radio-controlled competition, what is called Radio-controlled independent, when facing a purely radio-controlled opponent, it can’t adopt a strategy of attacking blind spots. This is because the field of vision for the operators of radio controlled robots is wide and they have no blind spots from above the ring. As such, instead of attacking blind-spots, they adopt a strategy of attacking from angles that are impossible for humans to respond to. At the 26th All Japan Robot Sumo Competition, the radio-controlled sumo robot “Abotan” (Team Udon) lost to stand-alone “Bishamon Zero” (Future Robotics Research Group) due to a lack of practice with this method.


TMR-TE, which had no distinguishable front or rear, has one perception sensor mounted on the front and the back and 2 on each side.

“Heavy Drinking Traveler” (left) which can only go forward, has only 3 perception sensors mounted on the front.
Some perception sensors, depending on the type, can detect materials, though it’s not easy in practice. If it detects a white flag, it may falsely identify the opponent as being there.
To that end, some sumo robots display white flags from both the left and right or else from one side. In the same way that bullfighters lure bulls with red capes, while luring the opponent toward the flag, they attack the side of opponents who fall for the trick. If it works, you can easily push the opponent out of the ring.
Of course, there are ways to avoid this trick. There is the method of recognizing opponents who have flags. If there are flags on the left and right side, this means the body is in the center. If it’s a sumo robot with a flag only on its right side, the body will be to the right. So, you should attack there.
What’s hard is when you encounter an opponent who drops only one or the other flag even though it can drop both.
When sumo robots are built, they can’t be more than 20cm on a side. Because they can be as tall as desired, they are built with flags erect. Because the flags are opened when the match begins, one method is to not drop either the left or the right flag. There really isn’t anything you can use to counter this except for analysis of an opponent’s previous fighting style or instincts derived from experience.
So, flags are for the purpose of confusing the perception sensor, but there is also the opposite strategy of increasing “stealth” by decreasing the perception sensor’s sensitivity. You will often see sumo robots painted black or with reflective coatings with this aim. Still, even more advanced methods are starting to appear.


“6 Dimensional K” (on the left) that may lower both flags or raise one, depending on the tactics.
Many sumo robots have a weapon called a blade, a sharp edge, mounted on the front. From the beginning of robot sumo, there has always been this sort of thing, but recently blades sharp enough to cause actual damage have begun to appear. As a safety countermeasure, standalone-type robots have begun to be able to be started and stopped by remote control. The purpose of a blade is to scoop up an opponent. A scooped opponent’s body is lifted up and so loses mobility. This allows them to be quickly pushed out. Naturally, almost all sumo robots have blades equipped. It is now considered standard equipment. It’s not a conclusive advantage and requires you to trust the fates in a close contest. If you can take them from the side or back where there’s no blade, you will be better off. But, there’s also no expectation that an opponent will just let you do it either. As such, the goal of the blade is its edge. The angle of both edges of the blade make it comparatively easy to slip under an opponent. If the blade can be slipped under the opponent, it’s easy to scoop them up and push them out. Because of this, a strategy called drawing can be effective. A charging sumo robot’s blade is easily tipped up, so you face the side where the blade goes down and is in a lowered position. It’s hard to get the timing right, but the certainty of scooping up an opponent is quite high. It’s an opportunity to show off programming for standalone types or control technique for remote control types. To more easily accomplish the draw strategy, having an arm mounted is effective. If the arm where the blade is attached is opened to the left or right, as the blade gets longer, it becomes easier to catch an opponent’s blade edge through a swinging motion. The downside of having an arm equipped is the loss of mobility. Also, if flanked to the side before the arm is fully open, one becomes helpless. For the ability to always rotate and face an opponent, good eyes are required if you’re a standalone type.
One way to make it hard to be scooped up by a blade that is effective is to stick to the floor. Even for highly maneuverable types, if you run while attached to the floor, you can prevent the blade floating up.
Because a metal ring is used in robot sumo, magnets are used to stick to the floor. There are some variations but this also is standard equipment for sumo robots today.
Among magnets, the strongest is neodymium. However, if you have a good setup, you can have a very sticky robot, even if you don’t have it. For example, Naruyo Tamura’s “Pensioner #3” who achieved 3 successive victories at the 26th All Japan Robot Sumo Competition, is said to have used magnets purchased from a wholesaler in his hometown. As such, because he couldn’t be pushed to defeat, they said he had a suburban strategy.
Sumo robots that use magnets to stick to the metal ring have seen their weight increase to hundreds of pounds, even though their actual weight is just around 6.5 lbs. After a match, if you pay attention to the sumo robot being lifted off the ring floor, this magnetic effect is easy to understand. It can be quite difficult to separate the sumo robot from the floor. Butt, it’s easy to carry them once picked up.
Theoretically, you could reach close to 1 ton in magnetic force. But, when thinking about pulling it off the floor after a match, it seems unlikely that such a sumo robot has gotten that far.
Of course, in the case of highly maneuverable robots, they have fewer magnets. The stronger the magnetic force, the more driving force has to be available for movement because they have to operate at high speed.



A sumo robot’s power and speed is largely dependent on its motor’s performance. To that end, the well respected Maxon motors are popular among sumo robots.
Of course, you can make strong sumo robots with other motors. Still, at the 22nd Competition, Yasumichi Kijima’s “6 Dimensional K” used a Tamiya motor until just before his first overall win. When you think that his best success till then was 3rd place, you can’t deny that the Maxon motor contributed to his victory. You could also say that the reason that Maxon motors have become the standard at all types of robotics competitions is due to the guarantee of their performance.
That said, regardless of your motor, buying a motor driver to control it is insufficient.
For sumo robots, strategy is important. If some future-state perfect technology sumo robots are built, that’s another story. But since that’s not the case, you have to leverage your strong points and cover your weaknesses. Advantages are a vital part of strategy and disadvantages are the result of imperfections. The motor driver must be designed corresponding to them and a purchased driver will have many gaps. In practice, it’s normal to build your own motor driver for sumo robots.
Sumo robots can’t be more than 20cm (less than 8 inches) on any side. They can be as tall as you want but a lower center of gravity works better for robot sumo so it’s common to use a storage area for flags and arms prior to the start of a match.
Sumo robots experience severe bumps so all wiring is stored within the sumo robot. Switches used to change programming are located in easily accessible areas on top and covered with a cap during matches.
Because all the parts are stored in an enclosed space, it is not an ideal operating environment for electrical components. Temperatures rise easily and can be the source of damage. If circuits assembled in the lab aren’t testing under real operating conditions, you won’t know if they operate correctly. Even if electric current stays within tolerances, for example, there is a concern that conditions like “low temperature burn” could appear in an enclosed space.
Lithium polymer batteries that are used in many sumo robots don’t have concerns about suddenly igniting under normal usage, but the danger is higher in this adverse environment. As such, in sumo robots, safety measures like fuses and poly switches are required. Another safety measure is that they can’t be used for more than one year.
Yasumichi Kijima’s “6 Dimensional K,” which won successive victories in the standalone category at the 22nd Competition, used a hard to ignite lithium ferrite battery and overcurrent detection circuits. Because it uses a non-contact DC current sensor, when current outside of standards continues for more than 0.5 seconds, it cuts off.
At the same time, 6 Dimensional K’s overcurrent detection circuit is used to determine its advantage/disadvantage when pushing against an opponent. If determined to be at a disadvantage, it does things like turn and push or apply the brake and halt. If a brake is applied to the motor, it can’t be suddenly overcome. If this stalemate continues in the ring, the judge can determine to pause and reset the contestants so it waits for this to recover as a strategy.
All Japan Robot Sumo National Competition: http://www.fsi.co.jp/sumo/en/index.html
 All About Robocon: The Robotic Contest from Japan
All About Robocon: The Robotic Contest from Japan Rescue Robots: Can Technology Save Lives?
Rescue Robots: Can Technology Save Lives? The Medical Robots Are Here: How Thousands of da Vinci Medical Robots Are Improving Medical Care
The Medical Robots Are Here: How Thousands of da Vinci Medical Robots Are Improving Medical Care Robotics and 3D Printing: Ushering in the 4th Industrial Revolution
Robotics and 3D Printing: Ushering in the 4th Industrial Revolution How Close Are We to Black Mirror’s Metalhead Killer Robot Dog?
How Close Are We to Black Mirror’s Metalhead Killer Robot Dog? The MEMS Device That Will Change The World
The MEMS Device That Will Change The World







